-
Basic composition of industrial robots
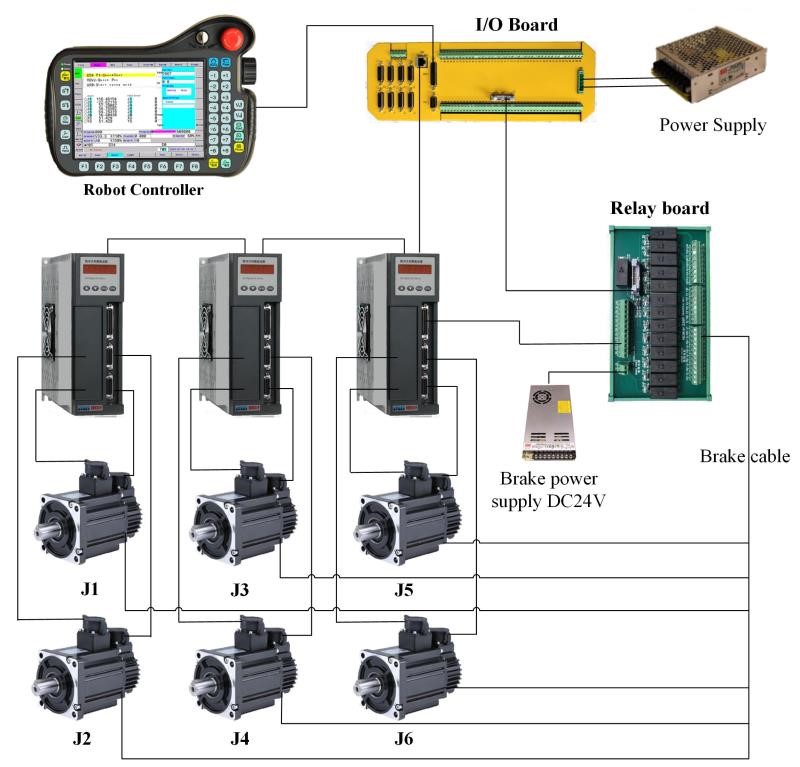
From the perspective of architecture, the robot can be divided into three parts and six systems, of which the three parts are: mechanical part (used to realize various actions), sensing part (used to perceive internal and external information), control part (Control the robot to complete various ...Read more -
CNC machining center programming skills strategy
For CNC machining, programming is very important, which directly affects the quality and efficiency of machining. So how to quickly master the programming skills of CNC machining centers? Let’s learn together! Pause command, G04X(U)_/P_ refers to the tool pause time (feed stop, the spindle ...Read more -

Seven technical highlights of the development trend of CNC machine tools in China.
Aspect 1: Compound machine tools are in the ascendant. Thanks to the powerful control ability of high-end CNC machine tools, increasingly sophisticated design and manufacturing technology, and increasingly mature application technology including programming, compound machine tools, with their pow...Read more






